director ONL | emeritus professor Hyperbody TU Delft [2000-2016] | professor Qatar University [2017-2019] | consultant Qatar Robotic Printing Qatar University [2019-2022] | email oosterhuis@oosterhuis.nl
Three generic intros for “The Component” written by Writesonic AI.
1
“Kas Oosterhuis’ The Component, a Personal Odyssey towards Another Normal is a unique and inspiring journey of self-discovery. Oosterhuis takes us on a journey of exploration, reflection, and transformation as he traverses a world filled with obstacles and opportunities. Written from a highly personal perspective, The Component is an intimate exploration of identity, personal growth, and the power of self-reflection. Along the way, Oosterhuis shares his many joys and struggles, as he searches for a new normal. As he confronts his fears, doubts, and anxieties, Oosterhuis discovers his true self and develops a newfound sense of purpose. As readers, we are invited to join Oosterhuis on his journey to find his place in the world and discover the power of taking ownership of our lives. The Component is an inspiring and thought-provoking read that will leave readers feeling empowered and inspired to take control of their own journey.”
2
“Kas Oosterhuis’ “The Component: A Personal Odyssey Towards Another Normal” is an inspiring account of his journey from a life of conformity and discontent to a life of purpose and freedom. Oosterhuis was a successful architect who was stuck in the rat race of modern life, until he made the decision to break free and pursue a more meaningful path. In his book, he takes the reader on a journey of self-discovery and exploration, sharing his experiences, insights, and reflections on the world. He encourages readers to find their own path and embrace the power of being different. As Oosterhuis writes, “It is only through embracing our differences that we can truly be ourselves and live our lives to the fullest.” Through his inspiring story, Oosterhuis encourages readers to break away from the status quo and create their own unique paths in life.”
3
“Kas Oosterhuis’ book, The Component, is a personal odyssey towards another normal. In this powerful and moving narrative, Oosterhuis takes the reader on a journey of self-discovery, examining the power of resilience and the importance of self-care. Through Oosterhuis’s experience, readers gain insight into the struggles and triumphs of an individual who is determined to create a life of their own design. Oosterhuis’s words are both inspiring and humbling as they explore the themes of identity, courage, loss, and hope. The Component provides an opportunity to look at one’s own life and explore the possibilities that lie ahead. By examining the past and looking to the future, readers can take solace in the knowledge that our lives are not predetermined and that there is always hope for a brighter tomorrow.”
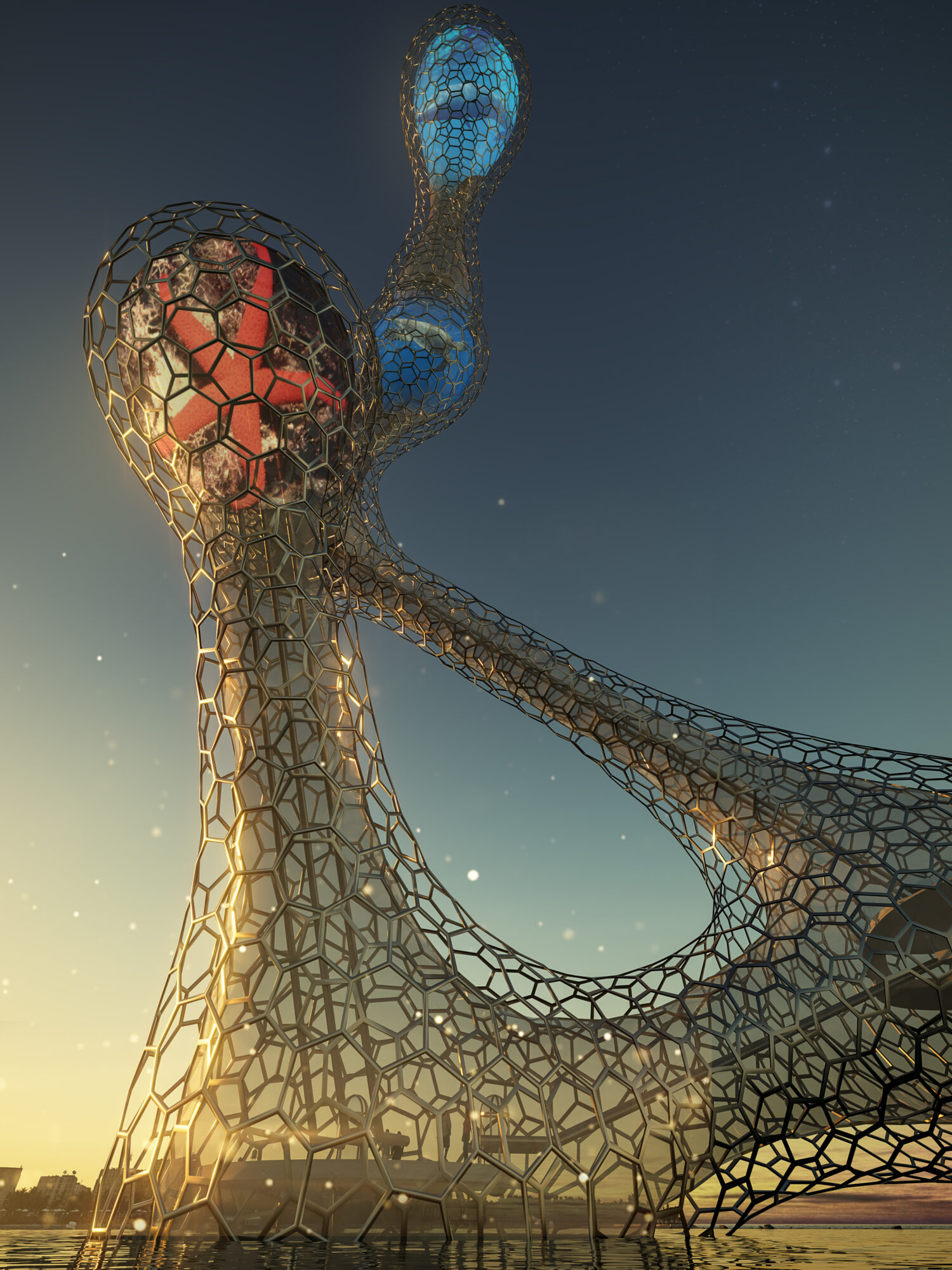
Legend has it that Suhail killed Naash, who had seven daughters and were in grief after their father murder and swore not to bury their father’s corpse till they avenge his death. Suhail ran away eastern south. The girls decided to chase him, four of them carried their father’s coffin and the rest followed. They kept pursuing Suhail but they never found his trace and kept travelling for the rest of their lives. The daughters of Naash (Banat Naash) or what is known as Ursa Major is a constellation in the northern sky that shows up all year long, and they are still chasing Suhail who appears a few months of the year and disappears from sight for the rest.
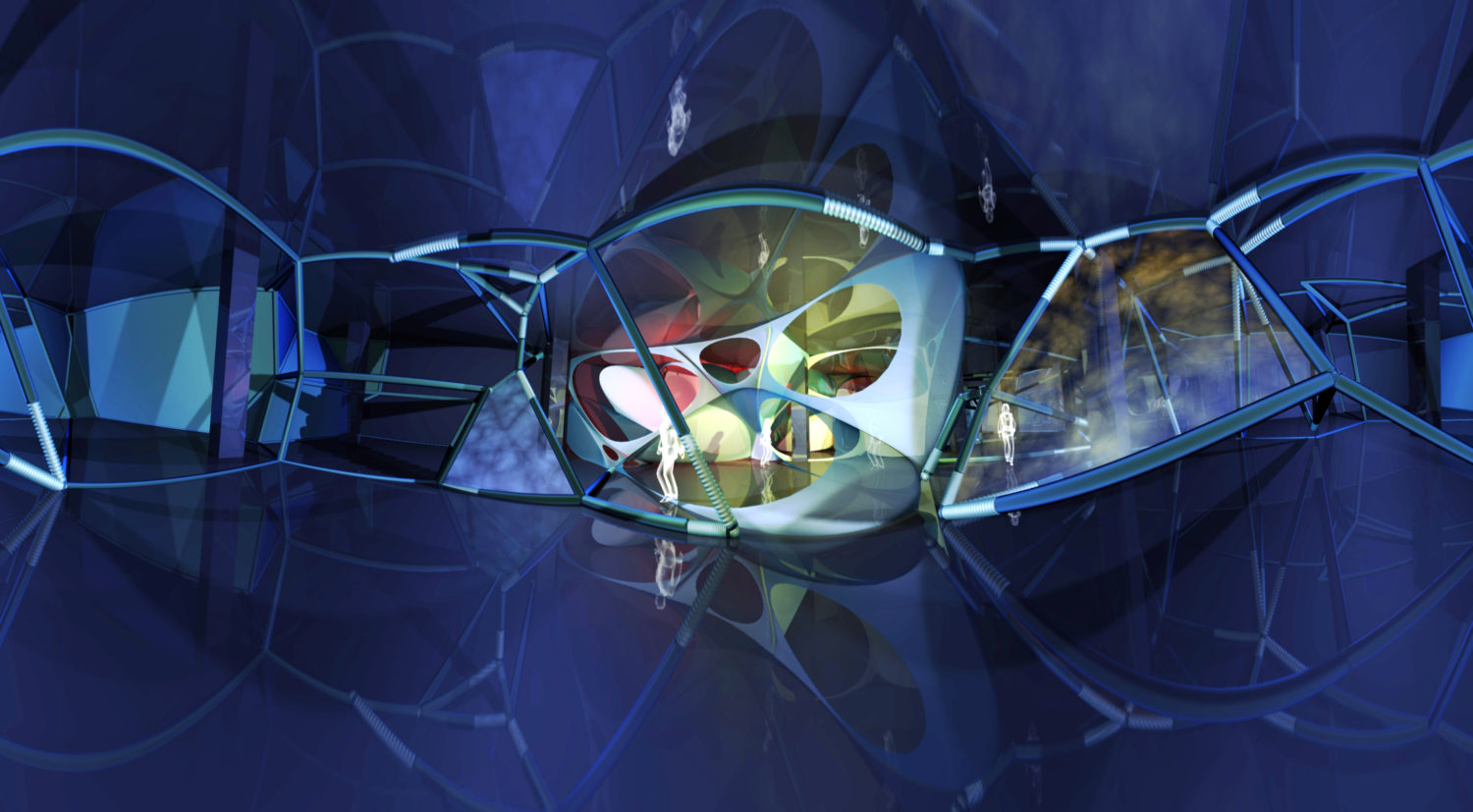
The Seven Daughters | double hexagonal structure | One Buildingsculpture One Detail
The Seven Daughters | Scenario Qatar 2.0
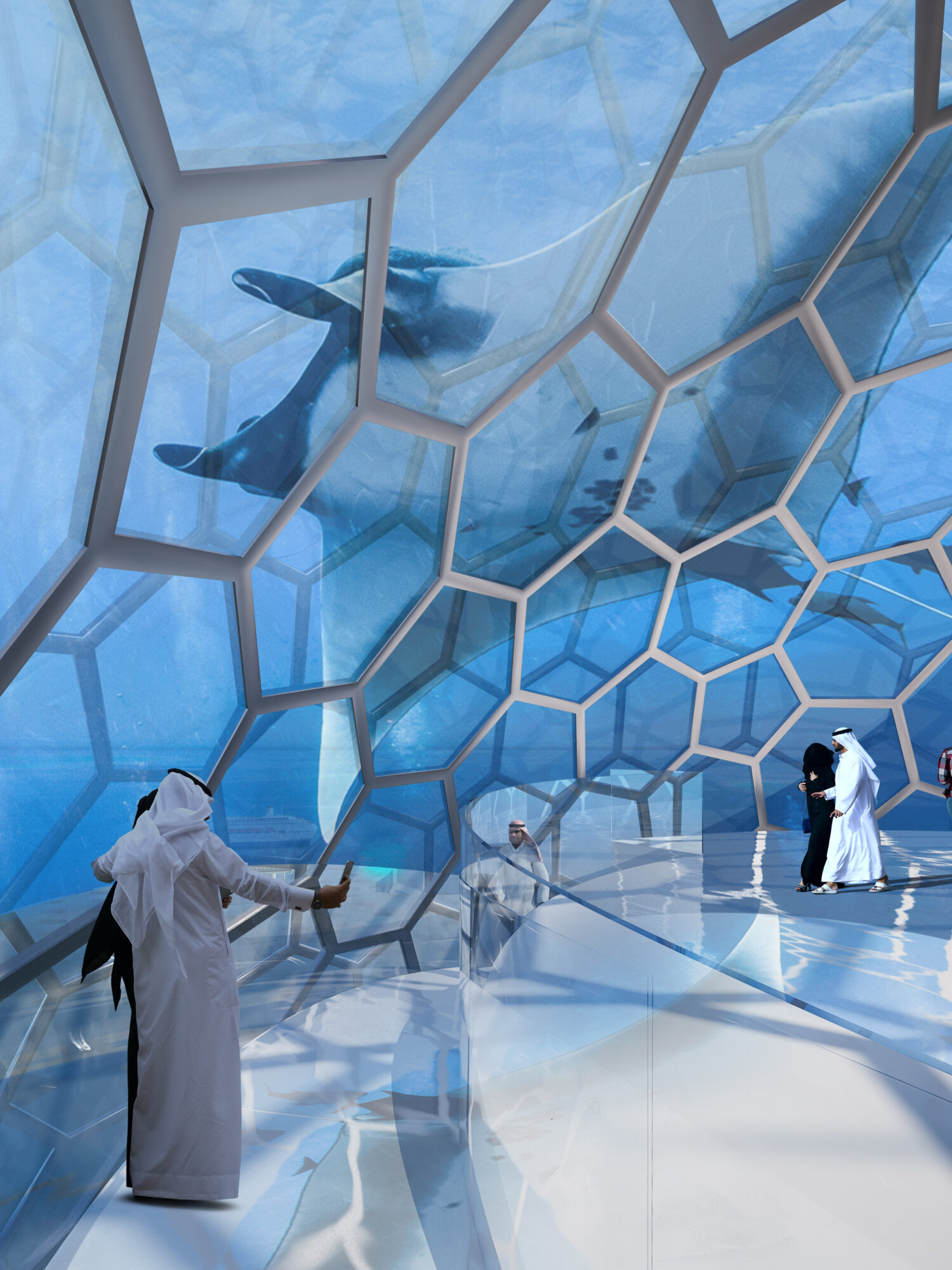
The seven nodes of the The Seven Daughters sculpture are accessible to the public. The public navigates from node to node to experience today’s version of the parable of the Seven Daughters. The Seven Daughters sculpture reflects the story of Qatar reinventing itself into Qatar 2.0.
The triangulated skeleton has a synchronized white semi-transparent exterior skin and semi-transparent interior skin. Projections from the inside are visible as a massage of lights at the outside, best visible at night. The shadows of the triangulated structure between interior and exterior skin are visible as well when the projections are on.
The complete structure is based on one single [parametric] detail including the structure and the skin. Additional elements are the travellators, escalators and elevators, and the [floating] visitor platforms in each node at the inside. Finite element calculations define the itchiness of the individual members of the structural diagrid mesh, stronger in the lower regions, slimmer in the higher regions.
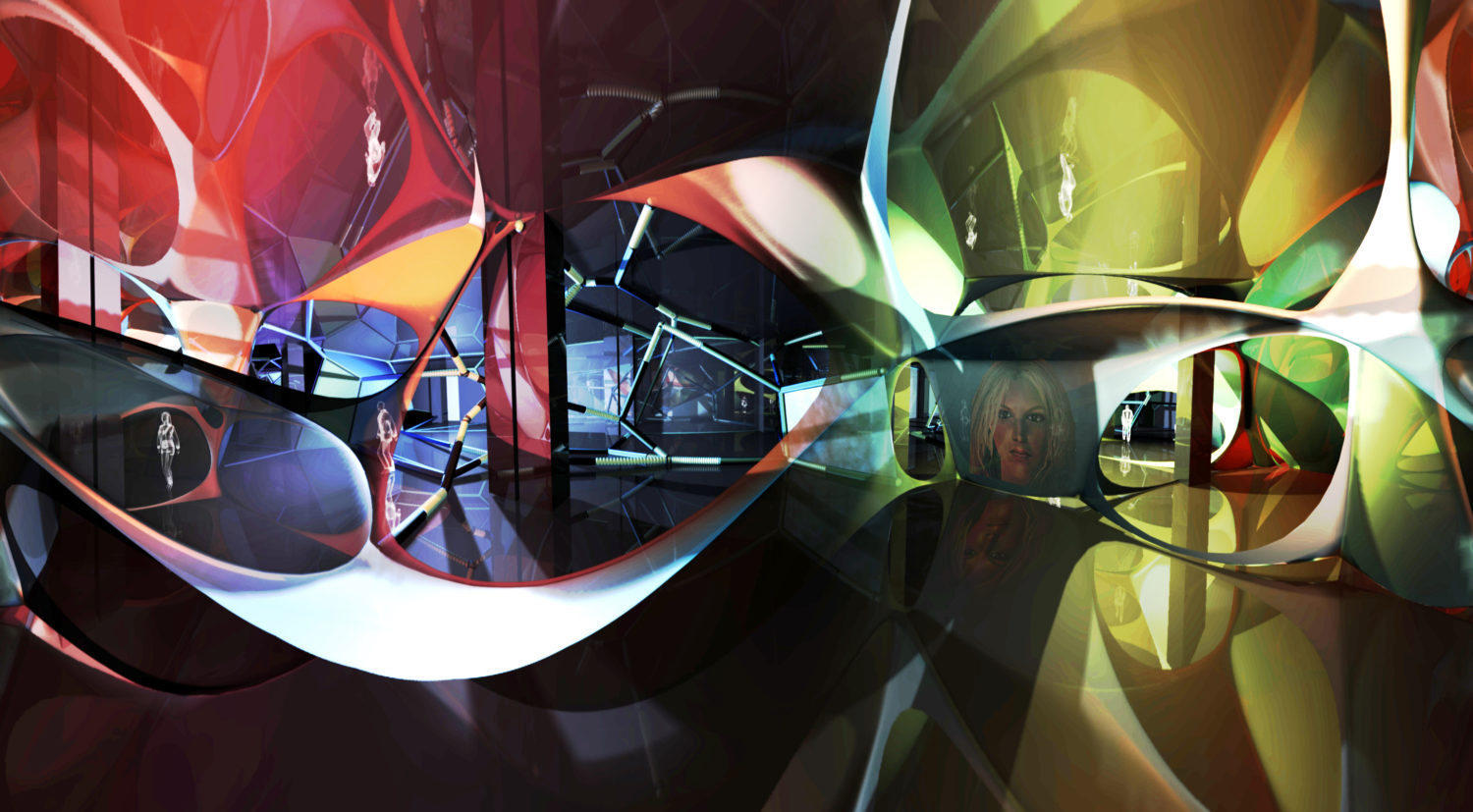
The Seven Daughters | Atmospheric images are projected onto the ETFE skinView towards the Seven Daughters Event Sculpture from the central axis of Lusail
We Robot[s] I robot is the title of the science fiction collection of novels by Isaac Asimov, published in 1958. This is more than 60 years ago, and first recently a serious discussion on robotics has reached the international architectural discourse arena. As always, architecture is slow to pick up new paradigms. What exactly is the importance of robotic architecture? How does robotic architecture affect the art and science of building? To what extent is today’s robotics different from robotics of 60 years ago? For today’s purposes we must replace the ‘I’ by the ‘We’. We no longer consider robots as isolated replica’s of human beings, but as members of a complex swarm, a swarm of cooperating robots. It would be even more accurate to define today’s robots as members of a swarm of the same species, interacting with many other robots of different species, including human beings and things. Things include a range of industrial products with augmented intelligence Like cell phones, furniture, building components, cars, while robots are actors in the Internet of Things. Robots are not alone, like we humans are not alone. We humans cannot function in an isolated fashion; we exist thanks to the connectivity of our brain to other brains. They are simply different players of the same system, but cannot be seen isolated from that system. A single brain cannot exist without a multitude of other brains. Similarly, I think about robots: A single robot does not make sense; robots must be seen as actors interacting and communicating with other actors.
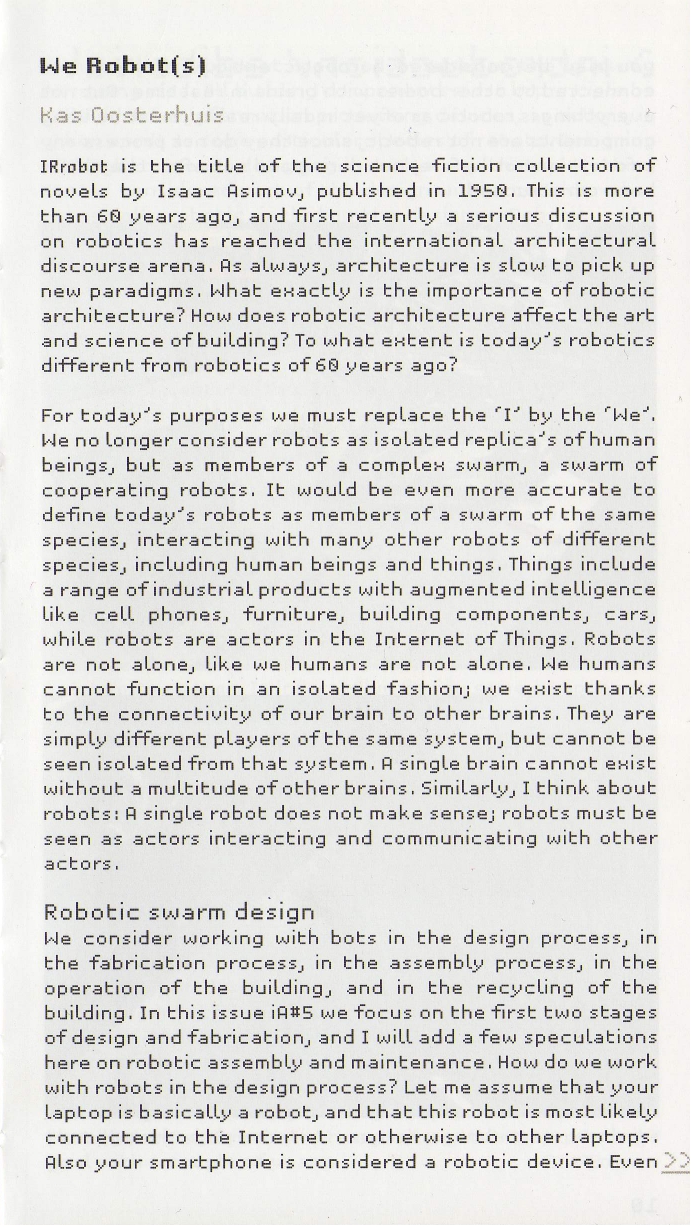
Robotic swarm design We consider working with bots in the design process, in the fabrication process, in the assembly process, in the operation of the building, and in the recycling of the building. In this issue iA#5 we focus on the first two stages of design and fabrication, and I will add a few speculations here on robotic assembly and maintenance. How do we work with robots in the design process? Let me assume that your laptop is basically a robot, and that this robot is most likely connected to the Internet or otherwise to other laptops. Also your smartphone is considered a robotic device. Even you may be considered a robotic entity since you are connected to other bodies with brains in real time. But pot everything is robotic as of yet in daily reality, most building components are not robotic, since They do not process any information not before, not during and not after they have been constructed.
Three-phase rocket
The whole enterprise at Hyperbody is based on the following intriguing idea: All building components must in principle be considered as information processing devices, as actors, in other words as some particular species of robots. Designing with robots means designing in such a way that everything that is considered part of the design will be considered as potentially robotic, including the designer. Robotic is the default state, in case the actor is deaf, dumb and blind, this will be seen as an exception to the robotic state of each individual component. The tools that are used for robotic design are the nowadays available computing hardware and software, the innovative aspect is the intention to design from within the new paradigm of robotic swarm architecture. Thus while in daily life only a fraction of the material that surrounds us behaves robotically, in the robotic swarm design process literally every thing and every one is considered a robotic actor, interacting a streaming parametric fashion with other robotic components. It is as if you are like a three-phase rocket:
1. Parametric design. In parametric design all building components are related to their immediate neighbors and to other parameters driving their shape. Parametric design is a mandatory condition for complex geometry.
2. Interactive design. In interactive design some components can change shape and content in response to external streaming data. Prerequisite for interaction design are a variety of sensors embedded in the immediate environment that sends information to the design process.
3. Robotic design. In robotic swarm design virtually all components, both of the design subject and of the design team, are active actors that are reading, processing and transmitting data all the time to their immediate neighbors and to anyone and anything that may pick up the waves and has learned how to feed on the streaming data. A typical robotic swarm design process supports the integration of design agents, producing streaming data that feeds the evolving development of the design. Needless to say that to reach the default state of a full-blown robotic swarm design process there are still some years ahead of us, as we are making the first exploratory steps, but are confident that Hyperbody’s robotic research agenda may reach its goal within a couple of years.
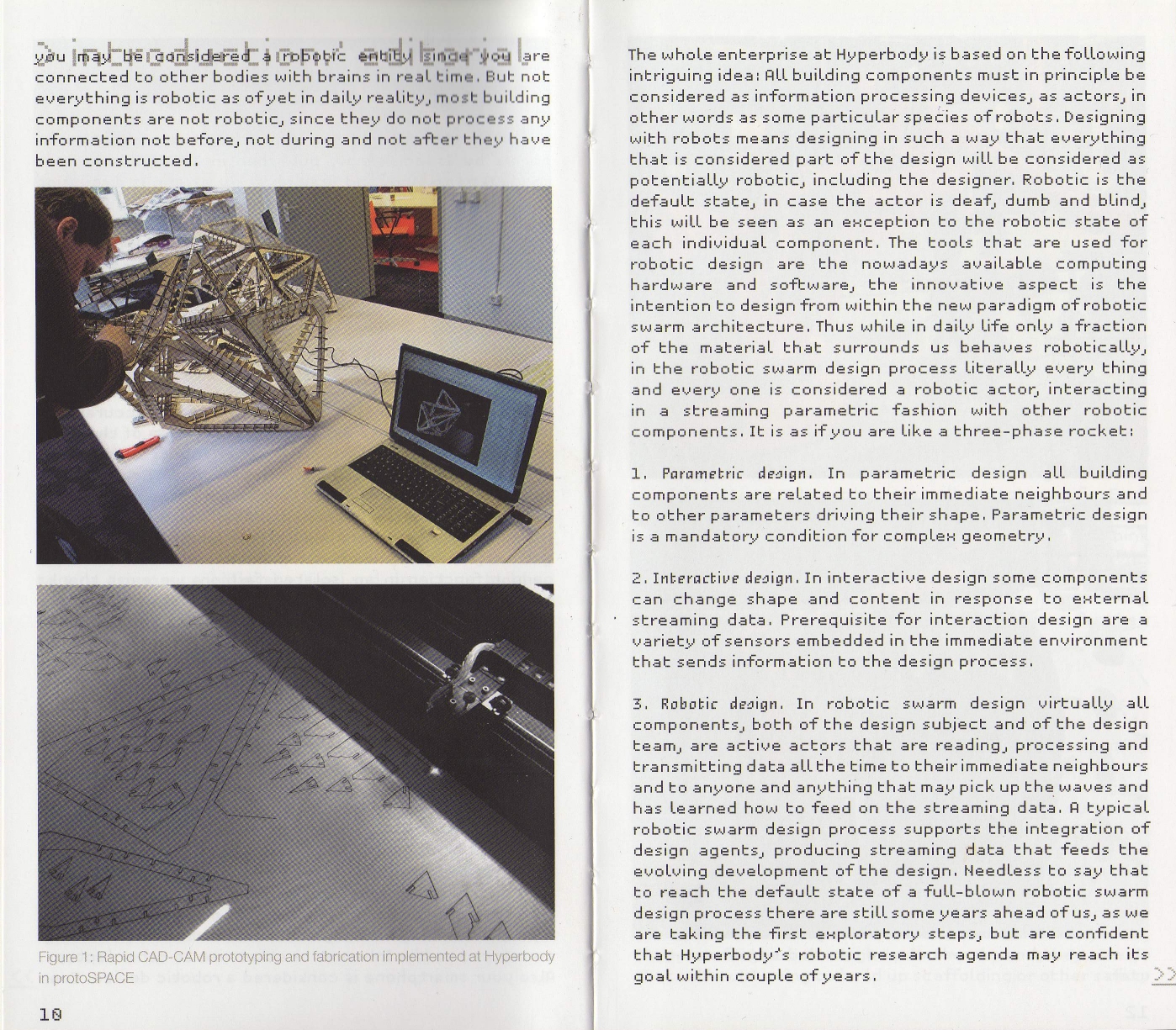
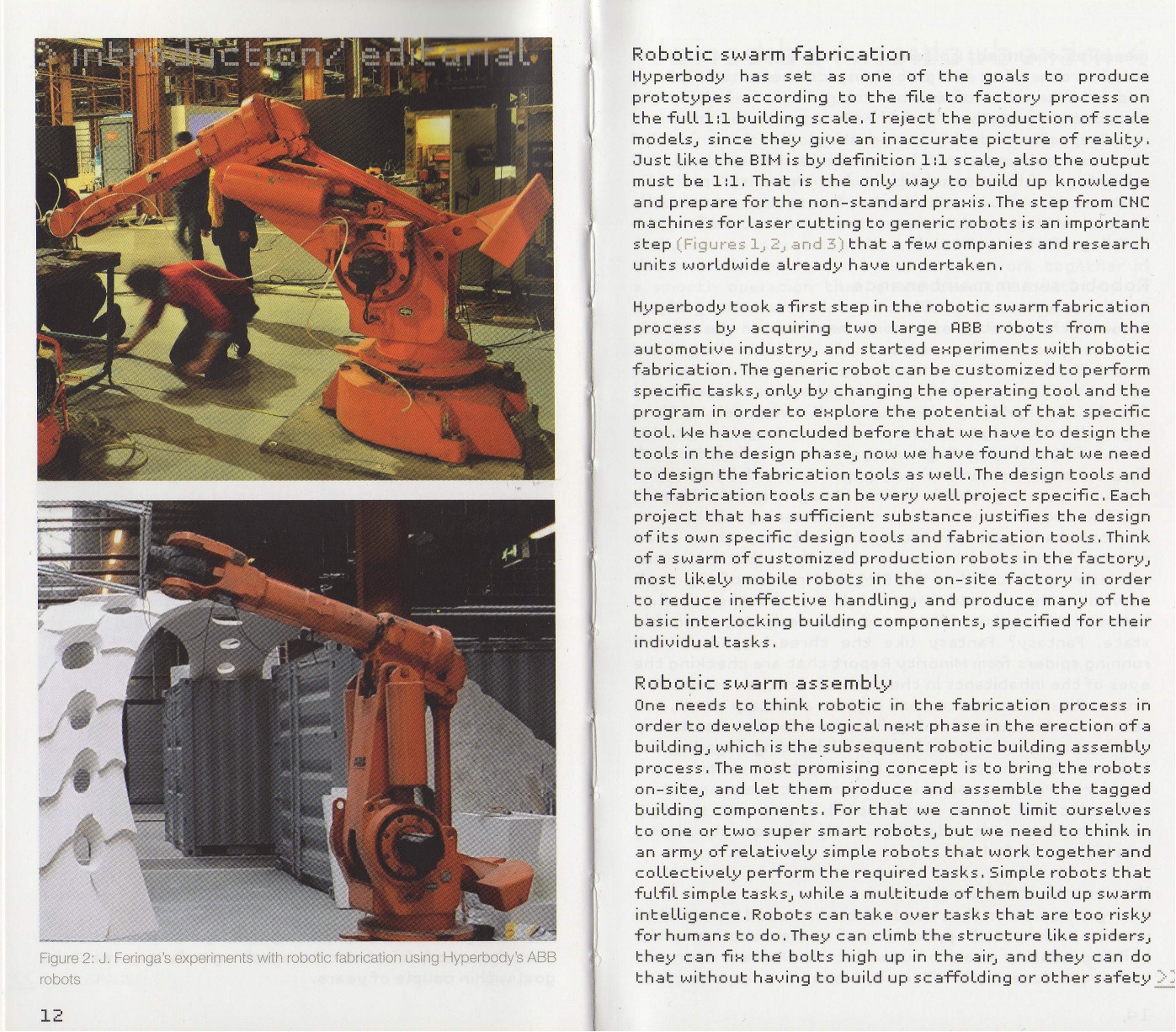
Robotic swarm fabrication Hyperbody has set as one of the goals to produce prototypes according to the file to factory process on the full 1:1 building scale. I reject the production of scale models, since they give an inaccurate picture of reality, Just like the BIM is by definition 1:1 scale, also the output must be 1:1. That is the only way to build up knowledge and prepare for the non-standard praxis. The step from CNC machines for laser cutting to generic robots is an important step that a few companies and research units worldwide already have undertaken. Hyperbody took a first step in the robotic swarm fabrication process by acquiring two large ABB robots from the automotive industry, and started experiments with robotic fabrication. The generic robot can be customized to perform specific tasks, only by changing the operating tool and the program in order to explore the potential of that specific tool. We have concluded before that we have to design the tools in the design phase, now we have found that we need to design the fabrication tools as well. The design tools and the fabrication tools can be very well project specific. Each project that has sufficient substance justifies the design of its own specific design tools and fabrication tools. Think of a swarm of customized production robots in the factory, most likely mobile robots in the on-site factory in order to reduce ineffective handling, and produce many of the basic interlocking building components, specified for their individual tasks.
Robotic swarm assembly One needs to think robotic in the fabrication process in order to develop the logical next phase in the erection of a building, which is the subsequent robotic building assembly process. The most promising concept is to bring the robots on-site, and let them produce and assemble the tagged building components. For that we cannot limit ourselves to one or two super smart robots, but we need to think in an army of relatively simple robots that work together and collectively perform the required tasks. Simple robots that fulfill simple tasks, while a multitude of them build up swarm intelligence. Robots can take over tasks that are too risky for humans to do. They can climb the structure like spiders, they can fix the bolts high up in the air, and they can do that without having to build up scaffolding or other safety measures one needs to take to protect humans. Imagine one robot brings building components in place and another robot of another robot family is bolting the components together. And then imagine many of those robot species smoothly cooperating. Also keep in mind that their jobs need not be repetitive, while taking real advantage of their capabilities when they pick up and fix customized unique components. The robot needs to be instructed to use proper parameters as extracted from the building information model.
Robotic swarm maintenance Finally, a few words on robotic maintenance: Many of you know of the robotic lawnmower machines or the robotic vacuum cleaners that respectively populate lawns and homes. But let us think ahead, imagine an army of hundreds of façade cleaning robots, walking the three-dimensional façade like gekkos, cleaning small areas at a time, regularly returning to their base stations to get a water or soap refill, and sprawling out again over the façade. Such façades would be continuously populated with hundreds of small cooperating robotic devices. Imagine human cleaning staff to cooperate with this army of cleaning robots as to monitor the façade structure, and as to report on small failures that needs to be mended. The robotic devices are instructed to follow the BIM, and in case of any small deviation they would immediately record the conflict between the actual state and the designed, desirable state. Fantasy? Fantasy like the three-legged smooth running spiders from Minority Report that are checking the eyes of the inhabitants in their search for the suspect Tom Cruise alias John Stanterton? No, not a fantasy at all, but rather a relevant technology required for the mandatory maintenance and inspection of tall building façades, for instance. Swarms of robots, invading both exterior and interior territories, operating in an interactive cooperation with educated human staff, would in the end strongly reduce maintenance and subsequently failure costs leading to a higher safety level.
Human robot interaction An urgent question that needs to be discussed here is what would a widespread application of swarm robotics in the building industry mean to human labor. We want everyone op to have a decent job after all, we want everyone to do relevant work and we do not wish to see many workers in the building industry unemployed. I became aware of this urgency when lecturing in China and discussing with Chinese architects in August 2011, After ample consideration I believe that the solution is in the early design concept. I believe we should not refrain from advanced technical solutions like swarm robotics, but at the same time we should not automate and standardize to the extreme, but design the automation process in such a way that humans find pleasure in meaningfully interacting with the robots. Robot hands and human hands should work. together in a smooth operation that guarantees the continuity of meaningful human labor and effective robotic operation at the same time. Do not attempt to optimize a traditional building design and building processes with human robotic processes, but take advantage of their potential and create a new surprising complexity based on simple rules in such a cooperative human-robotic fashion that one is able to create a new kind of non-standard architecture that otherwise would not have been possible. That is the only justification to choose the “we robots’ road towards future building.
iA#4 introduction | Introducing qBIM: the Quantum Building Information Model
Digital Pavilion | design ONL / Kas Oosterhuis | Seoul South-Korea | 2007
Trans-Ports
How is it possible that something as abstract as quantum mechanics can become instrumental to develop concepts for architectural design? In the first instance this may seem quite unlikely, but as I have seen during the past ten years, the correlation may even be very strong. I have worked with quantum architecture for some time now, without having it labelled as such; ever since I founded Hyperbody at the Faculty of Architecture at the Delft University of Technology in 2008, ever since I proposed a real-time behavioural pavilion Trans-Ports in 2000 for the Venice Biennale of Architecture (hosted by Massimilano Fuksas), and as early as 1999 since I showed a video of a provocative concept of the programmable building Trans-Ports during the first Archilab Conference in Orléans. I must have had the quantum paradigm already in the back of my head when I started to apply real- time behavior to the lights and sounds of the interior installation of the Waterpavilion in 1996/1997.
Digital Pavilion | design ONL / Kas Oosterhuis | Seoul South-Korea | 2007
Behavior
Furthermore, we practised quantum since we [as The Attila Foundation] made the inflatable ParaSite weblounge in Rotterdam, read and write environmental sounds in l996, and as from when I set up the international Genes of Architecture workshop back in 1994. Moreover, from the moment Ilona Lénárd and I invented the Global Satellite workshop during our Synthetic Dimension event in De Zonnehof in Amersfoort in 1991, and when we designed the Artificial Intuition workshops in the Aedes Gallery in Berlin in 1998. Finally, as of the day I started to assist Ilona in materializing her art works, which were all based on her immediate gestures as from the early 1988s, I have been occupied with quantum architecture, without referring to it as such. Now what exactly made me realize that there is something fundamental going on in the world around us, which justifies labelling this as Quantum Architecture?
The Q-word
Why is it that the Q-word so adequately describes what we did? We knew exactly what we were doing and for what reason, but we did not use the Q-word to describe our actions. In retrospect, I know that the quantum aspect is the notion of unpredictability and uncertainty of the behaviour of the smallest constituting components. From the moment I started to see the smallest constituting components as talkative actors instead of silent material, I realized I hit the basis of a new architectural theory. Architecture was no longer a question of composition, but of behaviour, of building relationships, of being informed, of processing and informing others. Those processing buildings are being maint by actors rather than regarded as static objects with fixed characteristics. This ongoing process is a never-ending procedure, similar to the unfolding of life itself, and can only be observed by extracting one type of information by killing other types of data. Imagine a building, which behaves and which is find a new working attitude and work with fuzzy data, with changing circumstances, with bandwidths and probability ranges rather than with explicit static data.
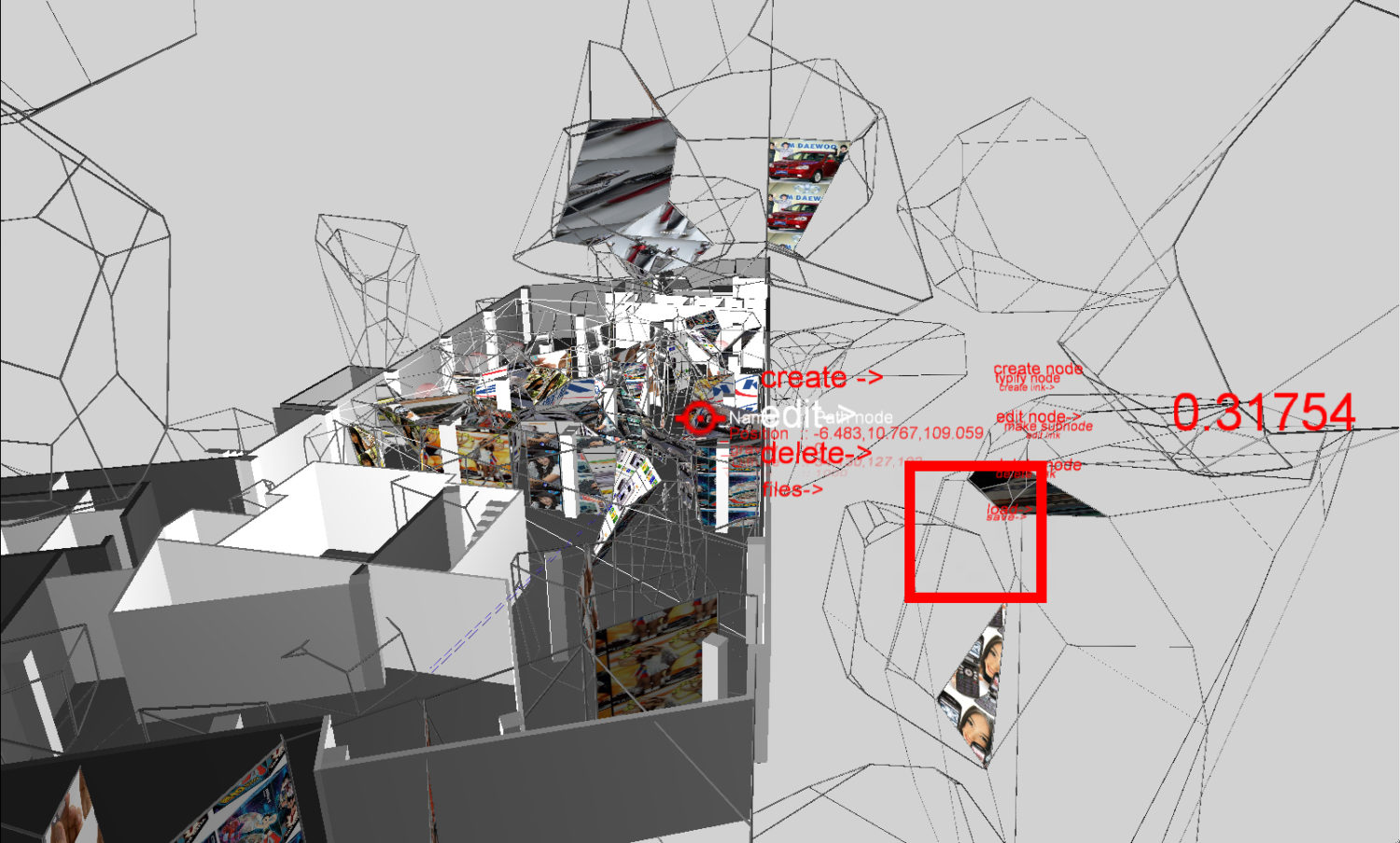
Interface design on the fly software | programmed by Christian Friedrich for ONL | Digital Pavilion | ONL / Kas Oosterhuis | 2007
Design on the fly
We must learn to work within streaming procedures and learn to design on the fly, to produce while we design. This can only be achieved by designing by wire. Let me try to catch the importance of the above for the practice of architecture. In our practices we work with parametric software like Grasshopper, Revit Architecture, ProEngineer, Digital Project and Generative Components. In the daily Hyperbody practice we work with software like 3DVIA/Virtools, MaxMSP, Arduino and Processing. In addition, we have developed our own design tools, applying the notion of swarm behaviour in Hyperbody education, Hyperbody research and Hyperbody projects. Inspired by especially the 3DUIA/ Virtools game design software, we became aware of the fact that the design process of architecture should be seen as a developing game, introducing the classical disciplines as players in a developing game. We began to see the design process of designing buildings as an input > processing > output body, step by step developing towards a mature building body, ready to act in the city fabric.
Bodies In Motion
We now realize that the very kernel of parametric software must be redesigned to incorporate the notion of real-time behaviour. Meaning that all input data should come in a streaming fashion, that all output must be sent out in streaming as well, and that the model must be a body in motion, not a fixed set of data. In fact, we propose a new meaning for the Building Information Model; we propose to conceive Bodies In Motion instead. In iA#4 we investigate the relevance of the qBIM, the Quantum Building Information Model, dealing with the principles of uncertainty and unpredictability. This iA#4 issue acknowledges the emergence of a new field in architectural theory: that of Quantum Architecture. Not as a metaphor as in Ayssar Arida’s book the Quantum City, but as a behavioural swarm technology, embedded in customized design tools. We could start by building living diagrama, relatively simple behavioural scripts, but based on the challenging paradigm of swarm behaviour.
Kas Oosterhuis | Emeritus Professor Hyperbody, Faculty of Architecture TU Delft [www.hyperbody.nl] | Principal ONL [Oosterhuis_Lénárd] bv [www.oosterhuis.nl / www.lenard.nl]
Why is the body of the iWEB [completed 2002] not a simple box? Why not a symmetrical ellipsoid, why not optimized to lead forces down along the shortest route? In other words, why does the iWEB have style?
The answer: there was a motive, a motivation to allow external forces to intimidate the body. The soft, mouldable building body of the iWEB was placed in a force field where several forces were operational at the same time, all of them motivating the shape of the body.
iA#3 | page 4-5
Vectorial body
As a designer, I needed a vector. I wanted the body to be a vectorial body, a body with a direction, with intention. I wanted it to feel as if it had entered a force field of strange attractors, active both inside and outside the volume of the body, driving the body towards a new formation: nose down, tail up, slim hips.
The language I use for describing the forces are inspired by car design and car styling. Cars are bodies designed with speed in mind; cars in speed are bodies in motion. Our building bodies are not bodies in speed, but certainly they are motive bodies, they certainly are bodies with an intention, a vector.
As I explained in the “Vectorial Bodies”essay [Archis, 1999] the fundamental characteristic of a vectorial body is that the driver / user enters from the sides. The user steps sideways into a body that has the intention to go places. Stepping into a car may take you places, literally. Stepping into a building body like the iWEB, you are absorbed into a spatial experience that takes you places mentally, and, additionally, through the spatial environments projected on the interior skin.
iA#3 | page 6-7
Gina
Once the designer of building bodies – the stylist formerly known as the architect – has learned to give style to the body as a whole, the word “stylist” no longer has the negative connotation of being just a decorator. The stylist becomes the designer who imposes intention and emotion to the otherwise apathetic body shape. The stylist knows how to work with the concept of Powerlines [visual artist Ilona Lénárd], as developed by ONL in the past decade, empowering architecture and art projects.
in the interview with car designer Chris Bangle, he states that architecture is decades ahead of car design when it comes to imposing emotion on the bodywork. I have the opposite impression: doesn’t Bangle realize how advanced his styling work is, and how far architects in general are from getting there? Just look at Bangle’s Gina prototype [2001], and then look at the BMW World by Coop Himmelb[l]au [completed 2007], both conceived in the early post-2000 years, roughly during the same period that I designed he iWEB.
The BMW World building, to me, is best characterized as a complicated roof design, a talkative cover on top of an otherwise not so eloquent building. Being experienced with the design and fabrication of nonstandard structures like the iWEB, I know that the structure, as elaborated by the structural engineers Bollinger and Grohmann, has been extremely labor-intensive, and therefore, a traditional engineering task. Because of the irrational nature of the design, the structure could not be scripted. The design intent of Coop Himmelb[l]au is metaphoric, that of a vortex cloud originating from a tornado. The emotion imposed is purely superficial, inside, there is not a cloud and there is nothing that feels like a tornado. The narrative power of the metaphor has passed away in the process of engineering and in the fabrication. Emotion has not moulded the fabric of the building. BMW World is NOT an emotive building body.
iA#3 | page 8-9
Emotive styling
But Gina IS an emotive body indeed, decades ahead in styling intention and emotive expression as compared to BMW World. Gina literally has actuating motive parts in its body, its body shapes gradually changing configurations of hood, doors, butt, eyes and seats, resonating with the mood cq the preferences of the driver. Mind you, this IS emotive behavior, completely different from a door, that just swings to open, or a hood, that opens on pushing a button. The very shape of Gina’s body re-shapes, adjusting itself to changing circumstances, expressing different emotions.
For me, it is very reassuring to see that Gina was developed in the same period as I designed the iWEB. Strangely enough, Bangle and BMW kept their prototype as a secret for years, only to be revealed years after the BMW production models [BMW Z4 and the BMW 1,3,5 and 7] had been launched. In retrospect, it is clear that the styling of the new BMWs has been derived from the expressive power of the emotive prototype Gina. Their curves act upon their mouldable bodies in a special way that only can be reached by the forces pushing from inside the body, which is composed of stretchable material, as literally is the case with Gina’s body.
The design approach for the iWEB was right on time, but indeed years or even decades ahead of mainstream directions in architecture. While architecture, as taught at the Faculty of Architecture in Delft was predominantly late modernist at the turn of the century [as in many other faculties in the world], and has shifted backwards to critical regionalism and sideways to conservative greenish strategies, reflecting the narrow-minded, xenophobic nationalist wave that has infected so many creative minds, ONL / Hyperbody still rocks, proudly standing up and pursuing interactive emotive design.
HyperWall
Fortunately, Hyperbody is not alone, we have strong ties with innovative forms like Festo, the world’s leading fabricator of actuators. Festo has commissioned Hyperbody to design the behavior of the interactive HyperWall, based on their Finray principle. Festo applied their Finray invention earlier, in their swimming and flying Air_ray, Aqua_ray and Aircuda objects. The HyperWall combines FinRay technology with Hyperbody-embedded behavioral programming and actuating techniques.
HyperWall and Gina.
The embedded computing technology is there, the design attitude has matured so much that we may embark on a truly emotive architecture, a professional approach towards motive styling.
My inaugural speech at the TU Delft from 2001 had as i’s title: E-Motive Architecture, emphasizing that emotive is not only about emotion but also deals with the ICT-related and kinetic aspects of design.my inaugural speech was proactive and challenging, based on my experience with, among others,the interactive interior environment of the Saltwater pavilion in 1997 and the Trans-Ports installation at the Venice Biennale in 2000.
It is reassuring to see that – against all conservative forces at the Faculty of Architecture to bring nonstandard complexity and emotive architecture to a halt in favor of of backward-looking critical regionalism – emotive architecture is firmly rooted in a ever-growing international movement that promotes customization in all its aspects. Motive styling is an under-appreciated field of study that needs to be critically examined in the professional setting of Hyperbody’s education curriculum.
The below text is the introduction I wrote in 2008 for the second issue of the iA series of Interactive Architecture.*) It was one year after the fire and we were discussing how to rebuild the new faculty. There was an international competition launched, but soon the idea of a new building was rejected, and it was decided to renovate a century old building closer to the city center of Delft instead. In hindsight, the renovation was a very costly operation, yet considered successful by the majority of the users. We as Hyperbody lost our unique iWEB as our state-of-the-art laboratory, while it was cut off from the grid and TU Real Estate did not intend to connect it again due to – presumably – excessive costs. We ended up with having our Hyperbody / Protospace 150 m2 lab inside the renovated building. The renovated building was partially extended with a sixties style large hall and was eventually far more expensive than a fresh new structure would have cost. Some of the points I argued for below were realized, but all in all the faculty became a more traditional place after the fire. I considered it the victory of the traditional over the new, and that became symptomatic for the Hyperbody years to come, whereas our budget was drastically cut, year after year. We had to reduce our staff from 12 people to 4 in the years between 2010 and 2014, while we were expelled from Architecture and re-positioned within Architectural Engineering. Not surprisingly, we were not amused, yet continuously thankful for the support we had been given in the years between 2000 and 2007, that is, until the fire broke out.
*) The complete iA series iA#1 – iA#5 are available at www.japsambooks.nl
iA#2 Introduction / editorial
In Delft, we will remember 5/13, rather than 9/11. the day the Faculty burnt. The day that chaos theory was applied in real life. Water leaking from a coffee machine, setting fire, and eventually burning down the complete faculty building. All was lost, except digital data, which was stored on the BK server back-up tapes. And miraculously the iWeb survived. I took a picture of the iWeb after the fire; it looked like a scene from a Star Wars movie, titled the “Battle of the Theories”. Swarm Architecture beats Architecture-As-We-Know-It. To begin an open discussion for possibilities for the new faculty, I have put together scenarios for 12 possible faculties.
01 | The burning faculty
“Architecture Muss brennen” stated Wolfgang Prix in 19968 when the student revolution was unleashed. At exactly that time, the faculty was built, and forty years later, it took fire literally. Now, Coop Himmelb[l]au statement is more relevant than ever. How can we make architecture relevant and actual? What kind of faculty would stimulate that?
02 | The swarm faculty
The complete staff and all three thousand students spread over the city, hosted by other faculties, in tents, in apartments in the city, in private offices, The faculty swarmed out and yet was connected via the Internet and mobile phones. In a sense, many people were mentally closer to each other than they were before, when they were physically close, but with back turned to each other, looking outside the windows. Now, we had the experience of looking towards the essential inner kernel of the faculty. We were living in a swarm. What kind of organization of the new faculty would support this kind of emphatic swarm behavior?
iA#2 | page 4-5
03 | The digital faculty
All people were rescued but their books, their personal memories, and their works of art. All these were claimed by the fire. but everything digital was rescued, the back-up tapes which were stored outside the faculty were OK, and all digital files of staff and students could be recovered safely. Had this fire occurred ten years earlier, it would paralyzed the people, now it activated many people to continue immediately with augmented energy.
04 | The 24-hour faculty
Opening hours of the faculty are limited. There was not much activity during the evenings, and on the weekends it was completely closed. I always wondered, why? both staff and students work almost continuously on their ideas and projects. The bad plumbing job probably revealed itself during the weekend, but there was no-one to witness it. The new faculty must be a 24-hour faculty; the designer’s mind never sleeps. I receive approximately fifty emails per day from my Hyperbody staff, some of them posted very late. The work always goes on.
05 | The adaptive faculty
After my thesis project in 1989, I came back twenty years later to invent the chair of Interactive Architecture, In those twenty years, virtually nothing had changed in the building,as if it had been asleep for that many years. Only during the last years were serious attempts at a real change made by the Dean: finally we had good coffee and more comfortable furniture, but its efforts were stranded in the fire. we need an adaptive, flexible faculty, a faculty that allows itself to be reinvented every seven years of architecture generation.
iA#2 | page 6-7
06 | The mobile faculty
We need a faculty that is open to the world outside the faculty. Students and staff have been too much encapsulated by the solid structure of the faculty. Imagine a faculty where 50% of the structure is fixed, while the other 50% is located in mobile units, either motorized or erected in places around the country. Naturally all mobile units must be equipped with wireless communication. We must see the factories, the building sites, the political rallies, settle in the Vinex locations for a while, travel the highways, and explore the highways. We must come closer to to the design offices, plug in to other faculties, or find a place on the beach. In these places, we can continue to work on our projects and design and discuss with anyone.
07 | The laboratory faculty
Staff and students must go to the factories, but the factory must also come to the faculty. The production machines inform us of what can be made. Staff and students must know what the machines are capable of/ with these, there is much more possible than is actually used. In general, a machine user [computer] only uses a few of all . The same is true for machine in the workshops; their potential is far greater than is generally known. Knowing the potential stimulates the imagination of the designer. Think of the IO [Industrial Design Engineering] central Hall at the TU Delft Campus, but imagine it covering the whole site.
iA#2 | page 8-9 | after the fire destroyed the faculty building | photo Kas Oosterhuis
08 | The robotic faculty
Now the faculty has 3D milling machines and machines for model making in general. We can learn from the ETH Zürich where they have installed robotic equipment to build prototypes on 1:1 scale. Their robots are generic, they are equipped to assemble complex brickwork as well.Using robotic equipment includes old materials but opens the way for experimenting with new materials as well. New robotic technology does not replace traditional technology. but adds another layer of intelligence to it – it is inclusive.
09 | The 1:1 prototype faculty
Staff and students should focus on 1:1 prototypes. This is the latest and most reliable way to understand the full potential of building. There should be a yearly contest to build 1:1 prototype, similar to the Stylos pavilion, but more related to CNC [computer numerical control] production methods using robotic equipment.
10 | The augmented faculty
The faculty must be emotionally linked to leading faculties worldwide. We need to experience on a daily basis what they do at the ETH, at MIT, Harvard, La Sapienza, TU/e. We could place webcams and install augmented reality interfaces, not to see out faculty being taken down, btu to see what is built up at all other faculties. We can embed the interfaces in the furniture, in the lounge spaces. There should be a permanent, real-time connection to talk, communicate, retrieve information, and send information in the augmented, networked swarm of faculties. Augmented reality does not replace physical reality. it adds another layer of intelligence to it. It is nothing to be afraid of.
11 | The sustainable faculty
Sustainability will continue to be a major issue. Sustainability is greatly facilitated by new technologies like wireless connections, CNC production methods, and C2C [Cradle to Cradle] concepts. Each of these new technologies require less energy and they are virtually waste-free. All production is controlled and waste will be recycled and/or function as food / fuel / fodder for other processes. Sustainable C2C and CNC production will be exercised in the prototype Factory.
12 | The theatre faculty
The faculty is a theatre where the renowned and unknown stars perform. They will capture attention and inform staff and students of their designer’s intentions. The new faculty could be a true theatre complex, with rising and falling stars attracting larger crowds, while new experiments are shown in intimate off-off theatre niches, the obvious and the fringe in one big complex. This theatre faculty should be open to all public, not only staff and students. It would certainly have cultural relevance to the general public. It could be rum as a commercial enterprise. The faculty could charge money for the lectures of the big shots, thereby financing more intriguing fringe activities.
We can make them all. Way superimpose all twelve faculties into one compound exciting new faculty, half fixed, half mobile, half prototype, half concrete, half augmented, half frozen, half interactive, half analogue, half digital, half manual, half robotic, half fixed work desk, half flex space, half burning, half wet. The momentum is here, the only thing that is badly needed now are the right programs for the right faculty, the right juries, and the right timing.
Kas Oosterhuis | Professor Chair Hyperbody TU Delft
Below is the text of the introduction that I wrote for iA#1, the first in a series of 5 iA bookzines [Interactive Architecture], to report on the innovative work at Hyperbody TU Delft. The iA#1 Introduction is written in 2007. iA#1 ISBN 9789059730588 is available at Episode Publishers / Jap Sam Books]:
Let me first clarify what is NOT. Interactive Architecture – from here on abbreviated as iA – is NOT simply architecture that is responsive or adaptive to changing circumstances. On the contrary, iA is based on the concept of bi-directional communication, which requires two active parties. Naturally, communication between two people is interactive, they both listen [input], think [process] and talk [output]. But iA is not about communication between people, it is 1] defined as the art of building relationships between built components and 2] as building relations between people and built components.
iA is the Art of Bi-directional Relationships
The Center for Interactive Architecture [CIA], Hyperbody’s research center, regards all iA built components as, essentially, input – processing – output [IPO] devices. iA theory includes both passive and active IPO systems. Let me clarify this with a classic example: the door. The door in the building functions as a switch. The door is either open or closed. When we add a lock to the door, it is either locked or unlocked. and the one who has the key is authorized to lock and unlock the door. The door functions in the building as a semipermeable membrane for the two spaces A and B at either side. The door allows people or goods to go in or to go out, which is as output from room B and input from A. Input and output are clarified now, what about the processing? The door processes people but also goods carried by the people, airflow, dust particles and smell. When the door is opened, the two systems find a new equilibrium: number of people, goods, light, temperature, and data. The door processes by counting what passes through the opening.
Input Processing Output Machine
In iA we do exactly that our iA software counts every change that occurs in the position and configuration of any IPO object. Each object that is defined in Protospace software [developed during the past few years in our CIA, behaves in time and keeps track of change. Each object is a kind of IPO machine, an agent communicating with other agents. An example of this type of communication is a bird communicating with other birds in a swarm. Birds are complex adaptive IPO systems, They receive signals and they send signals. They respond bi-directional in real time. birds follow some simple set of rules. Swarm behavior forms the basis of iA / Protospace software.
Repetition No Longer Beautiful
iA is not possible without an understanding and adoption of the new rules of nonstandard architecture [NSA] in the design process. NSA means that all constituting components of a built construct are principally unique. They all have a unique number, position and shape. If two components are the same then it is pure coincidence and NOT a simplification of the structure. In the design process and in the mass-customized file-to-factory production process, all components are addressed individually. Repetition is no longer the basis for production and therefore, no longer the basis for design. Repetition is no longer beautiful. In NSA, the unique characteristics of the components are perceived as natural, logical and beautiful.
iA#1 | pages 6-7
Proactive Building Components
What is the relation between nonstandard architecture [as we know it from the past decades] and iA? What does iA exactly has to add to the masterpieces of NSA? Despite all the achievements of NSA in the dynamic design process, the built product is still static, just like the repetitive modernist buildings based on mass-production. Our exemplary door is, in static architecture, operated and set in motion by a human. But watch it: the operation of doors and locks is undergoing significant changes. Doors have become automated and and locks pro-active. Soon doors and locks will open and close as they wish. But don’t worry: they will also open when YOU wish them to open. What will added to a passive behavior of is that the door will become aware of changing circumstances themselves, and they will act accordingly without instruction from a single human or a single sensor. Doors will become active building components, and so will each of the thousands of individual components, which assemble the built construct. Once electronics sneak into the building components, the next inevitable step is the doors will be programmed to respond selectively, based on a complex evaluation of many impulses. As a logical next phase in the evolution of doors, they will become proactive. They will propose changes themselves. Again, this is nothing to be worried about, humans will co-evolve like they co-evolved with dogs and other domesticated life forms. In fact, people will like it.
Complex Adaptive System
While iA is NOT just responsive and adaptive, it IS proactive. iA, in fact, proposes actions. it proposes new configurations in real time, all the time. Sometimes these propositions are unnoticeable slow, sometimes faster than you can see. In iA software, active behavior is built into the scripted code of the design. Each component is calculating in real time [that is, many times per second] its input and is producing its new output / behavior,continuously changing the state it is in. This ever-changing state acts as a new input into the IPO system of other components and so on. The functionally related group of components together display swarm behavior. The consistent set of thousands of active components is the complex adaptive system [CAS] of the building. Interactive architecture is the art of conceptualizing the CAS and the art of imposing style on the active building materials, being aware of the fact that many of the constituting components are programmable actuators.
The Information Architect
In iA, the architect becomes an information architect. The information architect is sculpting data. [S]he designs the flow of information and constructs IPO components selectively – transmitting, absorbing, transforming or simply bouncing back the information flow. My question will always be: c an iA be beautiful? I believe that it can. Object in [slow] motion get more attention than static objects – iA object are constantly in motion. Humans relate more to dynamic structures rather than static ones. It is simply more fun to watch live action than to watch paint dry.
Post Scriptum
The iA bookzine series was intended to consist of twelve issues bi-annually published over a period of 6 years. Each issue would have at least one scientific paper on a particular aspect of iA, one iA-driven MSc project, one iA-inspired case study from practice, one interview with a renowned researcher / practitioner, and a blog by myself. The blogs would be regularly published on the iA website. Eventually, Hyperbody published 5 iA bookzines between 2007 and 2013. Now, 12 years later, lest we forget, I will publish the introductions of the 5 iA bookzines here on this site in 5 consecutive blogs.
Kas Oosterhuis, editor iA bookzine series | Principal ONL [Oosterhuis_Lénárd] bv | Emeritus Professor Faculty of Architecture TU Delft [2000 – 2016]| Director Protospace Laboratory 2003 – 2016
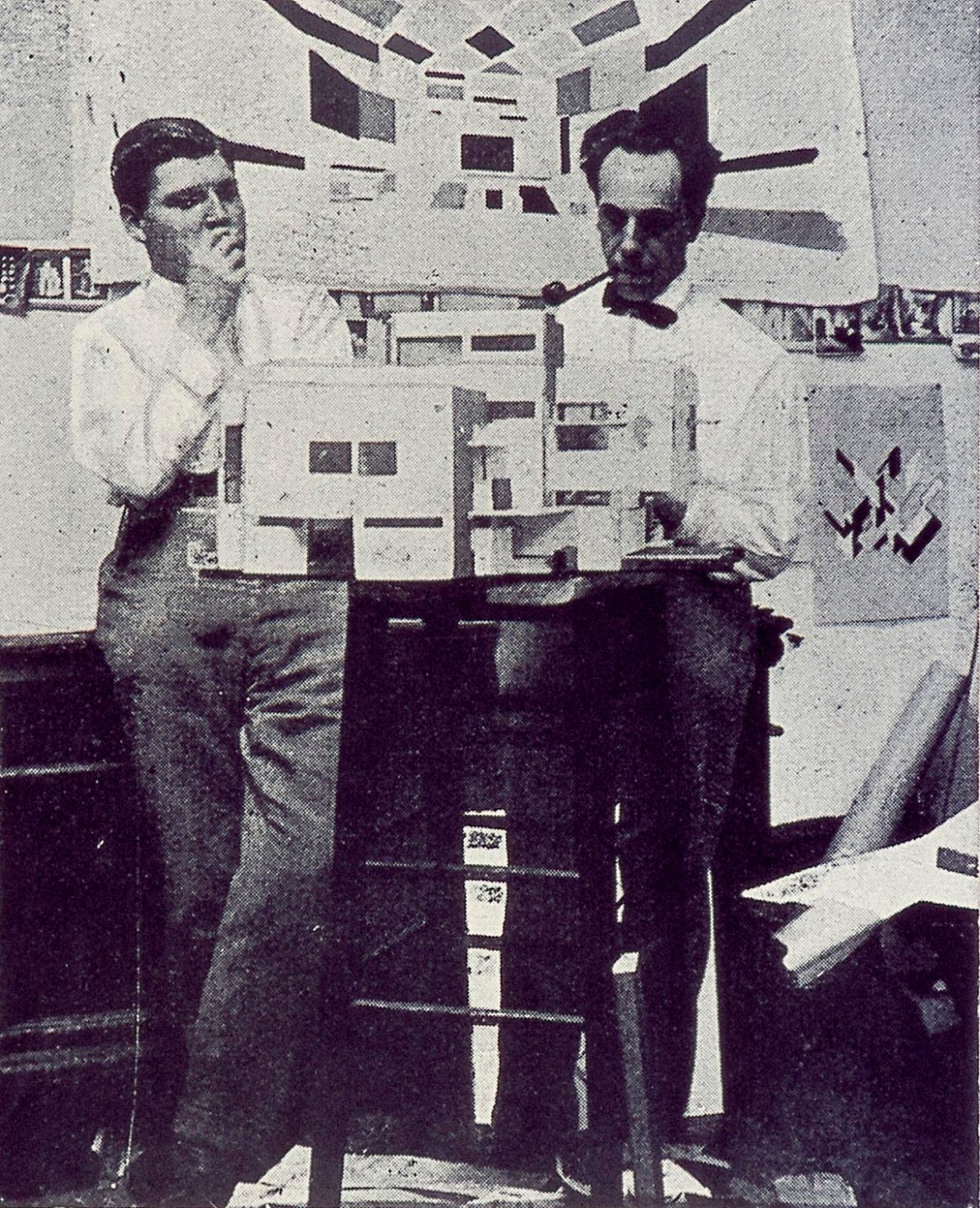
1988 | animation Maison Particulière | concept Kas Oosterhuis | execution Peter Snel
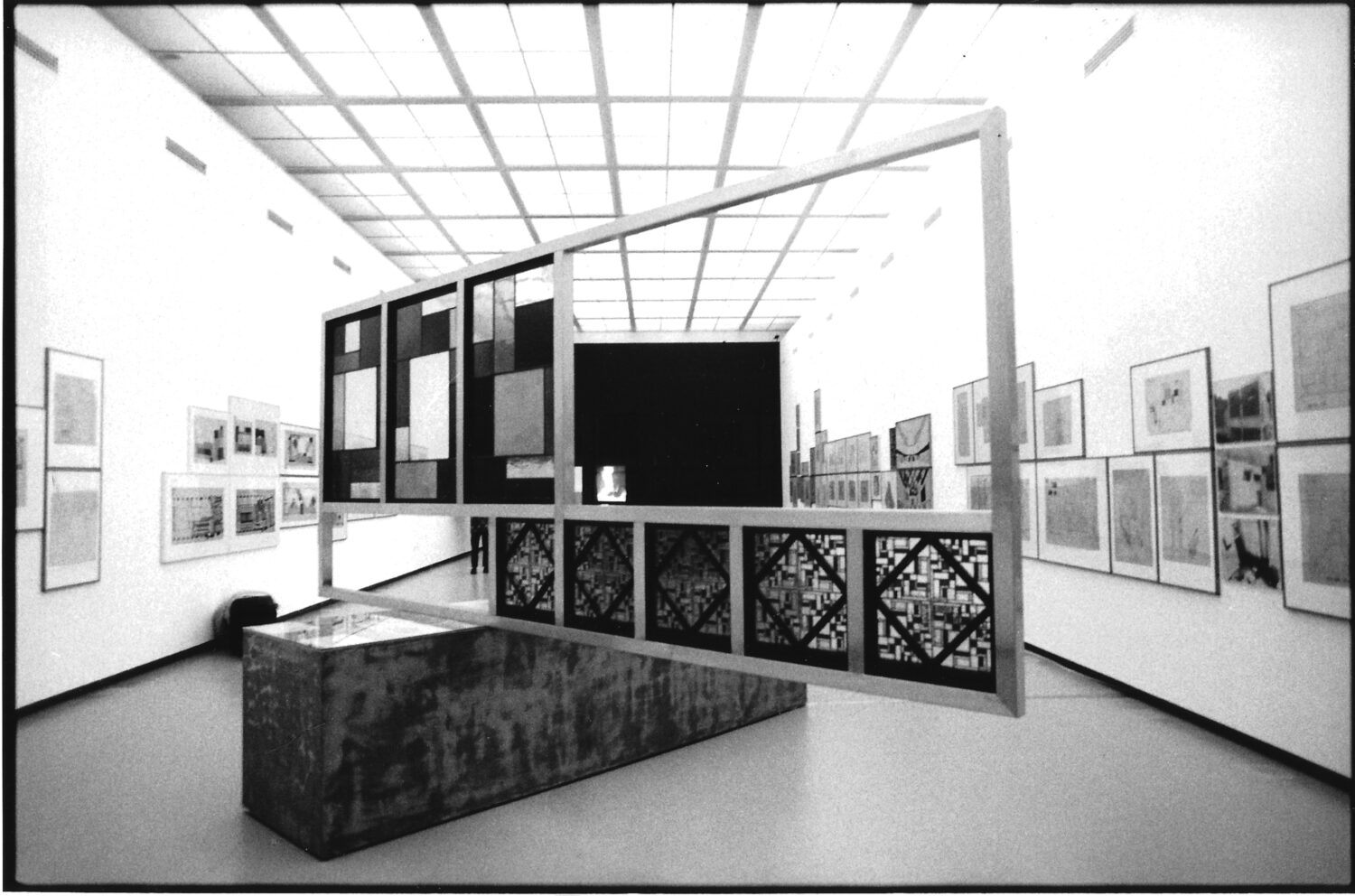
In 1988 Ilona and myself were selected to live one year in the Artist Studio of Theo van Doesburg in Meudon near Paris. That same year I was commissioned to design the exhibition of Theo van Doesburg at Museum Boymans van Beuningen in Rotterdam.
Exhibition Theo van Doesburg | exhibition design Kas Oosterhuis | Museum Boymans van Beuningen, Rotterdam | 1988 | photo Rob Mertens
As part of that exhibition that was curated by Evert van Straaten I imagined to animate Theo van Doesburg’s conceptual design – executed in collaboration with the then young architect Cornelis van Eesteren – for the Maison Particulière.
1922 | Theo van Doesburg and Cornelis van Eesteren at work| Maison Particulière
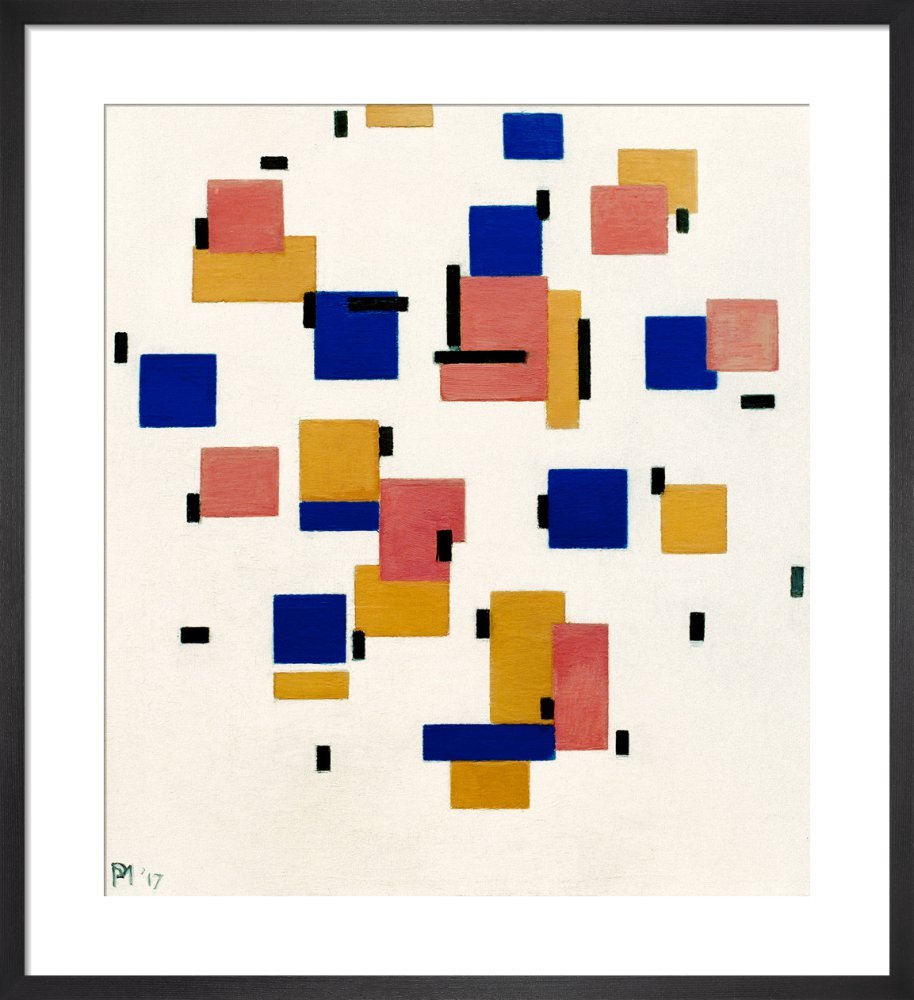
I identified the constituting components of the Maison Particulière and allowed each component to travel in 3d space confined to their X-, Y- and Z-axes, as to come together in that one particular configuration of the Maison Particulière, and to explode again to form the universe of dynamically mobile components. As in parametric design and in the Internet of Things, the constituting components are given a unique identity and are addressed individually. With this concept I wanted to reveal the dynamic nature of Theo van Doesburg’s universe. Not unlike Piet Mondrian before him, who started to paint instances of a abstract / concrete dynamic universe some 10 years earlier, yet just before Gerrit Rietveld designed the Schröder House in Utrecht [1924], Theo van Doesburg developed such dynamic universe inside his head. A universe that is inherently evolving, never the same, always in motion. One should always look at their paintings as a static instance of a dynamic world, frozen in time. It has been my intention to unleash time and free the component’s mobility.
1917 | Piet Mondria[a]n | composition in color A
And now, 100 years after date, I believe the time has ripened to realize in physical space such dynamic universe at the grand scale of architecture. In recent years, as a virtual prototype I imagined the Pop-Up Loft and the MANIC concept for the new nomadic international citizen to give shape and substance to the idea of merging of the virtual and the physical in programmable, customizable environments that would never stop adapting to changing circumstances in real time. At the turn of the centuries I pre-imagined a radical dynamic concept for architecture in my project Trans-Ports [2000].